Inspirat din tehnica origami, robotul care
se deplasează prin autopliere este cea mai recentă realizare a unei echipe de
cercetători americani, printre care se numără şi unul de origine română.
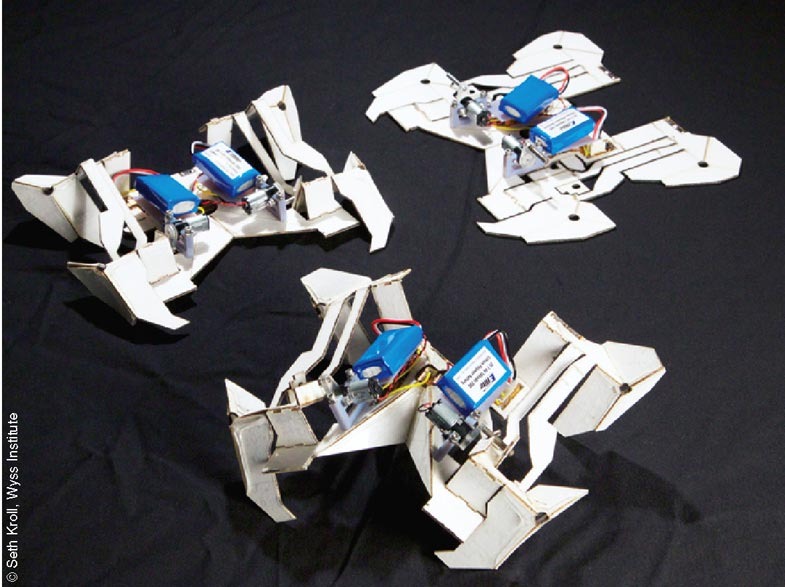
Robotul trece de la o formă plană la una împăturită în aproximativ patru minute
şi astfel se târăşte cu o viteză de 5,4 cm pe secundă, fără ajutor din
exterior. Responsabile sunt circuitele electronice încorporate într-o compoziţie
plană, în care s-a imprimat în prealabil modelul şanţurilor după care se va
face plierea.
Echipa de cercetare, din care face parte şi
Daniela Rus, director al Laboratorului de Informatică şi Inteligenţă Artificială
al MIT, a publicat un articol pe această temă în numărul din 8 august al
revistei Science. Plierea
materialelor bidimensionale în structuri 3D după metoda origami permite
realizarea unor structuri complexe, de diverse dimensiuni şi având o forţă şi o
suprafaţă crescute în raport cu greutatea. Procedeul se foloseşte deja pentru
confecţionarea panourilor solare, dar de data aceasta, este vorba de o structură
programabilă. Astfel, pe lângă folosirea de multiple tehnici şi materiale de fabricaţie,
cel mai important lucru este că permite încorporarea în compoziţia lor de
structuri cum ar fi circuite integrate, baterii, motoraşe, senzori care percep
modificările din mediul înconjurător, tehnologie wireless.
Procedeul se foloseşte deja pentru
confecţionarea panourilor solare, dar de data aceasta, este vorba de o structură
programabilă. Astfel, pe lângă folosirea de multiple tehnici şi materiale de fabricaţie,
cel mai important lucru este că permite încorporarea în compoziţia lor de
structuri cum ar fi circuite integrate, baterii, motoraşe, senzori care percep
modificările din mediul înconjurător, tehnologie wireless.
În forma plană,
robotul pliabil este format din straturi de hârtie şi straturi plane de
polimeri care păstrează memoria formei – un polistiren programat să se
contracte bidimensional atunci când este încălzit la temperaturi de aproximativ
100°C. Circuitele care generează temperaturi ridicate se găsesc în special la
nivelul balamalelor pe care se va face plierea, iar forma finală a structurii
3D depinde de localizările balamalelor în material şi de ordinea în care sunt
activate acestea. La temperaturi mai mari de 100°C însă, polimerul se activează
în mod uniform, rezultând un dispozitiv deformat şi nefuncţional. Totul este
controlat de un program software care generează şi apoi activează structuri 3D
de tip origami – în cazul acesta, programul se numeşte Origamizer; el
controlează punctele din reţea, succesiunea activării lor şi unghiurile sub
care se va mişca materialul.
Cercetătorii speră că
materialele îşi vor găsi utilitatea în operaţiunile de căutare şi salvare, în
care aceşti roboţi în forma lor „la rece“ ar fi direcţionaţi prin spaţii
înguste, cum ar fi resturile unei clădiri. Odată ajunşi la destinaţie, urmează
să se autoasambleze/expandeze în forma finală. De asemenea, materialele ar
putea fi utilizate după modelul IKEA – transportate în cantităţi mari, în
forma lor plată, pentru a se autoasambla la destinaţie, fie că asta înseamnă,
de exemplu, o antenă spaţială sau chiar… o locuinţă.
O cercetare paralelă
realizată prin colaborare între Cornell şi MIT şi publicată în acelaşi număr
din Science ajunge la un rezultat
similar folosind un metamaterial tip origami. Metamaterialele sunt structuri
artificiale obţinute din ansambluri de elemente individuale de dimensiuni
microscopice – mai mari decât atomii – care, aranjate în modele repetitive,
permit obţinerea unor efecte inaccesibile prin alte  mijloace. Metamaterialul obţinut
de cea de-a doua echipă de cercetare este ultrauşor şi ultrarezistent şi se
bazează pe un model de pliere în zigzag ce are la bază bistabilitatea (fenomen
fundamental prin care orice structură se poate afla în două stări bazale, un
exemplu fiind informaţia digitală de tip binar). În varianta plană, modelul
folosit dispune balamalele în os de peşte, alternativ, iar mişcarea generată
într-un punct – în acest caz, a fost generată manual – produce o serie de
„falduri “convexe şi concave în plan tridimensional („munţi“ şi „văi“). Cercetătorii
spun că aceste materiale vor putea fi incluse în structuri complexe, în care
stimulul poate fi generat prin diverse metode – software sau fluctuaţii termice.
mijloace. Metamaterialul obţinut
de cea de-a doua echipă de cercetare este ultrauşor şi ultrarezistent şi se
bazează pe un model de pliere în zigzag ce are la bază bistabilitatea (fenomen
fundamental prin care orice structură se poate afla în două stări bazale, un
exemplu fiind informaţia digitală de tip binar). În varianta plană, modelul
folosit dispune balamalele în os de peşte, alternativ, iar mişcarea generată
într-un punct – în acest caz, a fost generată manual – produce o serie de
„falduri “convexe şi concave în plan tridimensional („munţi“ şi „văi“). Cercetătorii
spun că aceste materiale vor putea fi incluse în structuri complexe, în care
stimulul poate fi generat prin diverse metode – software sau fluctuaţii termice.